Zajęcia w ramach projektu Cyfrowa Szkoła Wielkopolsk@2020, podprojektu Uczniowskie Laboratoria Informatyczne rozpoczęliśmy w listopadzie 2020 r. Podczas początkowych zajęć uczniowie zostali zapoznani z ideą i celami projektu, wybraliśmy tematykę projektu, podzieliliśmy się na odpowiednie grupy i sporządziliśmy odpowiednią dokumentację. Wykorzystując dostępne narzędzia (Dysk Google) utworzyliśmy folder, na którym będziemy dzielić się dostępnymi materiałami, instrukcjami, pomysłami, itp.
W ten sposób rozpoczęliśmy przygodę z Lego Mindstorms EV3 – wersją edukacyjną realizując projekt: LEGO W KOSMOSIE.
Podczas grudniowych zajęć zapoznaliśmy się z zestawem Lego Mindstorm EV3. Omówiliśmy sobie, z czego składa się dany zestaw oraz przedyskutowaliśmy jak wyglądają najważniejsze podzespoły takiego zestawu: kostka, silniki, sensory. Wykorzystując instrukcje zapoznaliśmy się z tym, jak należy podłączyć silniki i kostkę do komputera. Jednocześnie zapoznaliśmy się z interfejsem kostki EV3.
Następnie pobraliśmy, zainstalowaliśmy na komputerach odpowiednie oprogramowanie do programowania kostki i omówiliśmy jego funkcjonowanie oraz możliwości.
Podczas zajęć podejmowaliśmy różne dyskusje, wymienialiśmy się pomysłami odnośnie robotów, których można użyć w realizacji naszego projektu. Poszukiwaliśmy różnych rozwiązań od gotowych projektów do wytworów naszych wyobraźni. Niestety niektóre z tych pomysłów musiały zostać odrzucone ze względu na ograniczenia ilościowe otrzymanych zestawów.
Odkładając chwilowo na bok pomysły tworzenia robotów przystąpiliśmy do zapoznania się z światem algorytmów i początków programowania. W tym cyklu zajęć poznaliśmy się z pojęciem algorytmu, jego rodzajami i nabyliśmy umiejętność przedstawiania algorytmów w różnych postaciach (słownej, listy kroków, schematu blokowego) oraz przeanalizowaliśmy sobie kilka przykładów z wykorzystania algorytmów liniowych, warunkowych, iteracyjnych.
Chcąc wykorzystać zdobytą wiedzę zaczęliśmy zajęcia z programowania. Ze względu na ograniczone możliwości spotkań postanowiliśmy wykorzystać dostępne narzędzie online. W tym celu wykorzystaliśmy środowisko programistyczne online: Open Roberta Lab, które to zasoby zamieszczone są na stronie: https://lab.open-roberta.org/.
Środowisko bardzo podobne do tego, co mamy w programie EV3 Classroom, dzięki czemu w miarę łatwo będzie się uczniom przestawić na konkretny tok rozumowania.
W tym cyklu zajęć odbyliśmy cykl spotkań, podczas których uczyliśmy się tworzenia algorytmów, za pomocą których wykonywaliśmy poszczególne zadania i rozwiązywaliśmy bardziej skomplikowane zagadnienia algorytmiczne. Począwszy od prostego poruszania się (do przodu, skręt lewo/prawo, obracanie się, itp.) po bardziej zaawansowane zagadnienia np. poruszanie się wzdłuż linii, omijanie przeszkód (z czujnikami lub bez), itp. W ramach tych zajęć staraliśmy się wykorzystać gotowe rozwiązania oferowane przez Open Roberta Lab (dostępne maty oraz własne maty stworzone na potrzeby ćwiczeń) a także możliwości symulacji pracy robota, który wykonywał zadany algorytm stworzony przez uczniów.
Dzięki tym zajęciom uczniowie nabyli nową wiedzę i umiejętności, którą mogli wykorzystać podczas kilku spotkań stacjonarnych, które udało zorganizować się w szkole podczas pandemii.
Zajęcia odbywały się w większym lub mniejszym gronie osobowym. Te osoby, które nie mogły przybyć na zajęcia stacjonarne uczestniczyły z nami podczas tych spotkań wykorzystując dostępne zasoby komunikacyjne, np. discord, gogle meet, aby też mogły mieć swój wkład w realizację poszczególnych zadań.
Uczniowie mogli w końcu sami poskładać bazowe roboty czy własne konstrukcje, które następnie programowali je w celu wykonywania prostych czynności (ruch do przodu, lewo, prawo, itp.), wykorzystać otrzymany sprzęt w postaci tabletów, czy zestawów lego. Podczas tych zajęć uczniowie zauważyli różnice, jakie były podczas zajęć online w Open Roberta Lab, a jak kształtuje się to w rzeczywistości. Dzięki własnej kreatywności, pomocy innych osób z grup mogli rozwiązać problemy, które zostały im stawiane podczas zajęć stacjonarnych.
Uczniom bardzo te zajęcia się podobały ze względu na to, że mogli w końcu poskładać klocki LEGO, wypróbować różne warianty rozwiązań i sprawdzić w praktyce swoje wcześniejsze pomysły odnośnie budowy robotów potrzebnych do realizacji naszego projektu.
Zapewne finalne wersje robotów jeszcze będą się różniły od obecnych. Wzbogacone o nowe pomysły i możliwości zostaną ponownie przeprogramowane i przetestowane.
W międzyczasie powstają już projekty graficzne makiety Księżyca, którą chcemy wykorzystać w naszym projekcie. Jesteśmy na etapie ustalania wielkości makiety, umiejscowienia poszczególnych elementów – kratery, przeszkody, miejsce startu, itp.
Podczas naszych dotychczasowych zajęć wykorzystywaliśmy również różne narzędzia TIK. Chociażby bardzo pomocny Mindmeister, Google Drive, answergarden. Dla osób z mocniejszymi komputerami poleciłem oprogramowanie: Lego Digital Designer – dzięki któremu uczniowie będą mogli wirtualnie poskładać klocki Lego.
Aby oderwać się, chociaż na trochę od świata LEGO i algorytmów postanowiliśmy wykorzystać tematykę zawartą w poradniku dydaktycznym.
Omówiliśmy sobie tematykę praw autorskich w sieci i jak korzystać z otwartych zasobów sieciowych – jest to dosyć istotne zagadnienie, gdyż masa informacji jest udostępniana przez ludzi i wykorzystywana bezprawnie lub niezgodnie z obowiązującymi zasadami. Prowadziliśmy również szereg dyskusji odnośnie znaczenia, reklamy, propagandy oraz kampanii społecznych – starałem się uświadomić uczniom, że w cyfrowym świecie stają się obiektami różnych manipulacji i oddziaływań i często nie są świadomi takich działań.
W dalszej perspektywie zajęć omówiliśmy sobie ważne zagadnienie, jakim jest Facebook – mam przecież zajęcia z młodzieżą, która różne rzeczy wrzuca do sieci. Uczniowie poznali zalety jak i wady tego rozwiązania oraz konsekwencje, jakie mogą wystąpić w niedalekiej przyszłości np. poszukiwanie pracy, itp.
Podczas dotychczasowych zajęć uczniowie zdobyli nową wiedzę i umiejętności, którą mogli wykorzystać podczas zajęć stacjonarnych lub online – widać ten efekt na załączonych zdjęciach. Chociażby takie klocki LEGO, nie muszą być tylko nudną układanką, ale potrafi rozbudzić kreatywność, ciekawość. Dodatkowo wzbogacone moduły o elementy programowania rozwijają jeszcze większe możliwości rozwojowe i zwiększające umiejętności uczestnika zajęć. Jednocześnie uczniowie wzbogacili się o nowe narzędzia TIK, jak się okazywało podczas zajęć były im zupełnie obce. Oczywiście to nie znaczy, że uczniowie całkowicie nie znają narzędzi TIK. Podczas zajęć zdalnych wykorzystywali tylko te, co oferowała szkoła podczas zajęć zdalnych np. classroom, gmail, tesportal, itp. Narzędzia zaprezentowane podczas obecnego etapu projektu poszerzyły ich dotychczasową wiedzę, umiejętności oraz inne kompetencje cyfrowe.
Dzięki rozbudowie infrastruktury IT w szkole wzbogaciliśmy się sieć WI-FI, otrzymaliśmy nowe narzędzia dydaktyczne – laptop, tablety, które wspomagają realizację zajęć z wykorzystaniem TIK. Zarówno uczniowie jak i ja, jako nauczyciel prowadzący zwiększamy swoje kompetencje cyfrowe. Uczniowie zdobywają nową wiedzę, umiejętności, lepiej i efektywniej pracują w grupach realizując postawione przed nimi zadania czy problemy do rozwiązania. Dzięki takim zabiegom można wychwycić osoby, które stają się liderami poszczególnych grup.
W przypadku realizacji naszego projektu: „LEGO W KOSMOSIE” widać już pewne efekty. Na obecnym etapie realizujemy nasze założenia projektowe zgodnie z harmonogramem. Zapewne w następnym okresie dokonamy niewielkich korekt w modelach robotów oraz w ich zachowaniu (programowanie) i zajmiemy się budową makiety potrzebną do realizacji naszego projektu.
W końcu nastał czas aby przystąpić do III etapu prac w projekcie. Zauważyliśmy, że wcześniejsze pomysły nie są tak dobre jak na początku zakładaliśmy. W związku z tym dokonaliśmy znaczących zmian konstrukcyjnych w naszych robotach. Ustaliliśmy również, że roboty mają w miarę możliwości samoczynnie wykonywać zaprogramowane czynności i poruszać się po wyznaczonej trasie. Zadanie polegało na tym aby roboty wykonały 3 pełne „przebiegi” pozwalające na dostarczenie i rozładunek „towaru”.
Pełni zapału przystąpiliśmy do realizacji tych założeń, które wbrew pozorom nie były łatwe do zrealizowania. Postanowiliśmy, że skonstruujemy 3 roboty. Pierwszy z nich będzie robotem chwytającym, drugi będzie robotycznym ramieniem a trzeci robot będzie pełnił funkcję transportera. Powstało kilka koncepcji konstrukcyjnych z których wybraliśmy najbardziej odpowiednie i przystąpiliśmy do ich wykonywania.
W międzyczasie postanowiliśmy skonstruować z papieru planszę, aby można było testować już pierwsze efekty prac – poruszanie się robotów i sprawdzenie, czy wykonują prawidłowo swoje zadania.
Po kilku dniach dostarczono nam planszę po której będą poruszały się roboty. Oczywiście finalna wersja znacząco różni się od tej pierwotnie zakładanej. Plansza została wykonana z poliestrowej tkaniny powlekaną PCV o wymiarach 2×2,5 metra. Ze względu na rozmiary i trwałość było to dla nas idealne rozwiązanie.
W dalszym etapie prac przystąpiliśmy więc do wgrywania wcześniej napisanych programów wykonywanych przez roboty i sprawdzaliśmy jak funkcjonowały na naszej nowej powierzchni.
Po wielu próbach nie wszystko układało się po naszej myśli. Plansza okazała się zbyt śliska na nasze roboty i musieliśmy zmienić trochę koncepcję pracy. Problemem okazała się powtarzalność wykonywanych czynności. Niestety roboty zachowywały się nieprzewidywalnie i za każdym razem po uruchomieniu programu potrafiły inaczej się poruszać.
To skłoniło zespoły do zmiany pierwotnych założeń i postanowiliśmy, że pojazdy będą poruszały się po wyznaczonej trasie, ale za pomocą wyznaczonych linii.
Takie działanie wymusiło niewielkie zmiany konstrukcyjne w dotychczasowych robotach – dołożenie czujników kolorów oraz czujników ultradźwiękowych, na szczęście obeszło się to bez większych problemów. Efekty tych prac widać poniżej:
- Robot A: Chwytak– zadanie: przenoszenie skałek do punktu transportowego– modyfikacje: 2 silniki napędowe; czujnik koloru; silnik głowicy

- Robot B: Ramię– zadanie: załadowywanie skałek na pojazd transportowy– modyfikacje: przycisk ograniczający oś Z; przycisk ograniczający wysokość ramienia; silnik obrotu osi Z; czujnik ultradźwiękowy; silnik głowicy; silnik wysokości głowicy
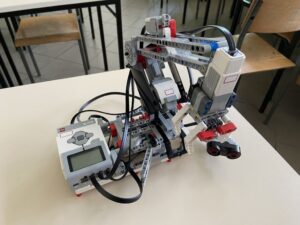
- Robot C: Transporter– zadanie: przenoszenie skałek do punktu rozładunkowego– modyfikacje: czujnik koloru; czujnik ultradźwiękowy; dwa silniki napędowe

W międzyczasie powstawały elementy wizualne mające na celu uatrakcyjnić naszą matę – kratery, skały. Po pewnym czasie wszystko już było gotowe i mogliśmy przystąpić do pełnego testowania.
Po licznych próbach, korektach w końcu przystąpiliśmy do nagrywania filmu w celu przestawienia sposobu realizacji naszego projektu.
GALERIA PROJEKTU
- All